受託開発
【燃料電池セルのアライメントステージ開発】
燃料電池の薄板部品をロボットで正確に把持するための装置です。コンベア上のワークの位置をカメラで正確に認識するのは難しいため、一度アライメントステージに置いてから、位置を微調整し、ロボットで毎回同じ動作で同じ位置を把持できるようにします。アライメントステージは、X軸、Y軸、θ回転方向に微動する特殊な機構が用いられます。市販もされていますが、数が多いため内製するとのことでお客様からご依頼を頂きました。運動学計算を含めた要求仕様書の作成と機械設計(Inventor)を担当させて頂きました。
【樹脂部品検査AIの開発】
自動車に使われる樹脂部品の不良を判定するAIの開発です。コアのアルゴリズムは既にC++で動作していましたが、検査工程の管理や結果の表示などの周辺機能がうまくいかないとのことで、お客様から手直しのご依頼がありました。C++を静的ライブラリとして、生産性の高いC#でコールする手法をご提案し、短納期で納品させて頂きました。
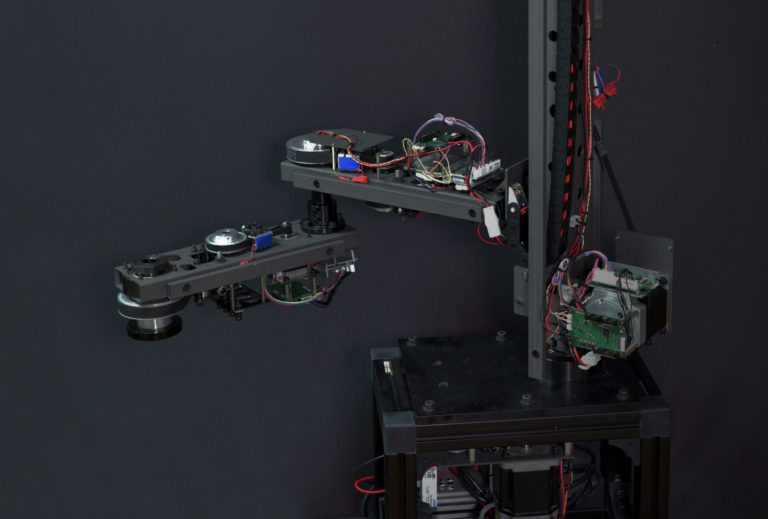
【パラレルリンクロボットの開発】
都内の大手計測器メーカ様が開発された可変インピーダンスモータに関するご依頼です。通常のサーボモータは位置を保持しようとするため、外からの力ではビクともしませんが、可変インピーダンスモータは、柔らかさやバネ特性を自在に変化させることができます。そのため人と接触しても安全で、人と接することの多い協働ロボットに最適なモータとして期待されています。この画期的なモータの特性を示すデモ機としてパラレルリンクロボットをご提案させて頂きました。
【垂直多関節ロボットの開発】
同じく都内の大手計測器メーカ様から、触覚伝達が可能なマスタ・スレーブロボットをご用命頂きました。可変インピーダンスモータをマスタ側、スレーブ側ともに使用し、生卵が扱えるほどの繊細な触覚伝達を展示しました。企画、設計、製造、組立、納品までワンストップで対応させて頂きました。
【建材ラミネータの開発】
建材パネルを保護するラミネータをパネルからはみ出さずに少し内側に貼り付ける技術が難しく、その新規開発でメカ部分をゼロから設計させて頂きました。お客様で電気系を実装され、順調に稼働しています。
【業務用複写機検査ソフトウェア開発】
ステイプラのフェンスの整列度などをレーザー変位計で計測する装置の制御ソフトをC#で開発させて頂きました。
【エンジン製造ラインPM業務】
大手自動車メーカのエンジン組み立てラインのPM業務を担当させて頂きました。1億円200人月規模の弊社としては過去最大の案件になります。
【農業用4輪オフロードAMR開発】
農業現場での省力化を目的とした四輪オフロードAMRを開発しました。独自のサスペンション構造と駆動制御により、凹凸のある不整地でも安定した走行が可能。全方位旋回機構により回転半径が小さく、狭小な畝間でもスムーズに転回できます。収穫支援や運搬作業への応用により、持続可能な農業の実現に貢献します。
【CAN通信PCBおよびファームウェア開発】
協働ロボット向けに、CAN通信対応の制御基板およびファームウェアを開発しました。複数の関節やエンドエフェクタ間のリアルタイム通信を可能にし、制御の同期精度を向上。STM32マイコンと高耐性トランシーバを採用し、ノイズ環境でも安定した通信を実現。システム全体の配線を簡素化し、保守性と拡張性に優れたアーキテクチャを構築しました。
【その他】
最近は新規事業の立ち上げ、共同開発などでご相談を頂くことが多く、いわゆるゼロイチ案件全般を得意としています。